
Alternatywny sterownik pomp ciepła z serii Panasonic Aquarea oparty o ESP32


PanaProxy to idealne rozwiązanie dla osób poszukujących alternatywnego sterownika do pomp ciepła z serii Panasonic Aquarea, które oferuje dużą elastyczność i możliwości integracji z systemami automatyki domowej.
Oparty na ESP32 sterownik został zaprojektowany z myślą o pełnej integracji z Home Assistant. Dzięki pracy w systemie ESPHome urządzenie może być szybko wdrożone jako komponent automatyki domowej sterujący ogrzewaniem domu lub monitorujący pracę oryginalnego sterownika. Poszczególne parametry pracy pompy wystawiane są jako encje w Home Assistant, co umożliwia tworzenie zaawansowanych automatyzacji i scenariuszy dostosowanych do indywidualnych potrzeb użytkownika.
🔧 Najważniejsze cechy techniczne:
- ✅ ESP32-C3 – energooszczędny mikrokontroler z Wi-Fi i BLE
- 🌐 Wbudowana antena 2.4 GHz dla Wi-Fi i Bluetooth
- 🔌 Alternatywne zasilanie 5V przez USB-C
- 🖧 Złącze RJ45 do komunikacji przewodowej Ethernet (tylko PanaProxy-ETH)
- 🔧 Kompatybilność z pompami z serii Panasonic Aquarea
- 🏠 Kompatybilność z ESPHome – pełna integracja z Home Assistant
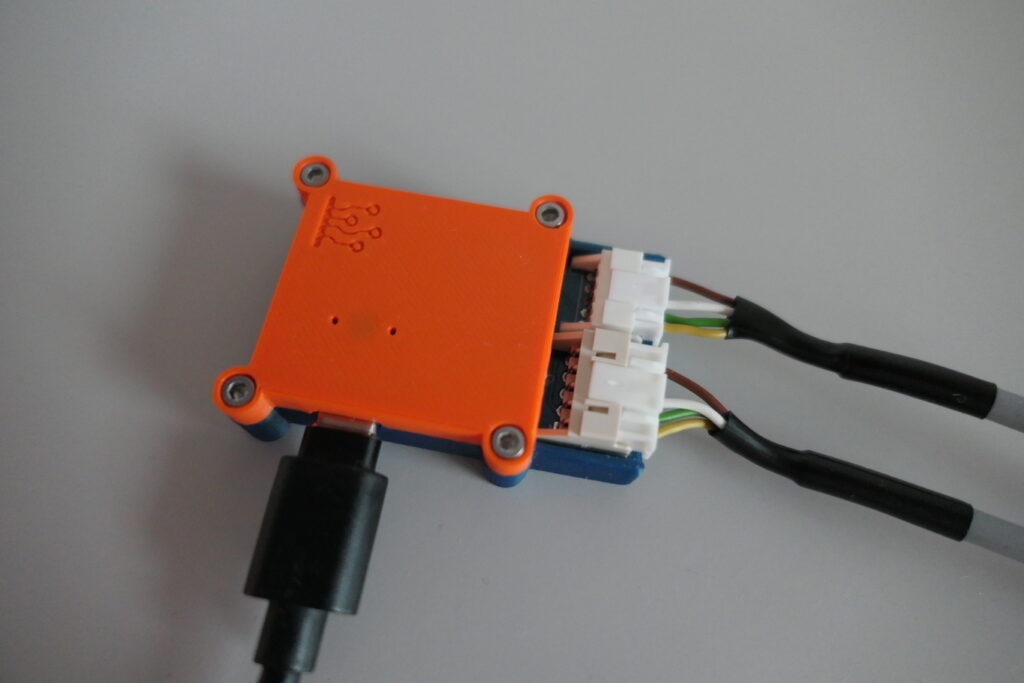
Sterownik jest wyposażony w podwójne złącze kompatybilne ze złączem oryginalnego sterownika, co pozwala na podłączenie urządzenia do pompy za pomocą oryginalnych przewodów zastępując oryginalny sterownik, a także włączenia go w szereg z oryginalnym sterownikiem. W takim zastosowaniu może pełnić rolę monitora zbierającego dane o pracy pompy ciepła i przekazującego je do systemu automatyki domowej.

Projekt PanaProxy powstał na bazie popularnego projektu HeishaMon. PanaProxy rozszerza funkcjonalność HeishaMon, oferując możliwość natywnego uruchomienia w środowiskach z Home Assistant, umożliwiając wykorzystanie wszystkich funkcjonalności obecnych w ESPHome, takich automatyzacje wykonywane bezpośrednio na urządzeniu, obliczanie współczynnika COP, czy też integrację z innymi czujnikami i urządzeniami w ekosystemie automatyki domowej.
⚙️Warianty sprzętowe
Dostępne są dwie wersje urządzenia: podstawowa, wyposażona we wbudowaną antenę 2,4 GHz pozwalająca na komunikację bezprzewodową Wi-Fi (PanaProxy), oraz wersja rozszerzona, która dodatkowo posiada złącze Ethernet umożliwiające stabilne połączenie przewodowe (PanaProxy-ETH).

🛒 Dostępność
Chcesz zostać jednym z pierwszych użytkowników PanaProxy? Napisz do nas na adres [email protected].
🛠 Pełna otwartość i elastyczność – działaj po swojemu
Urządzenie współpracuje bezpośrednio z Home Assistant za pośrednictwem ESPHome, co pozwala na:
- 📤 publikację danych do MQTT, natywnego API, endpointów REST, socketów TCP/UDP
- 🔧 prostą konfigurację przez YAML lub interfejs graficzny,
- 🔄 aktualizację firmware’u OTA
Wszystko działa lokalnie – bez pośredników i chmury.
Urządzenie zostało zaprojektowane z myślą o użytkownikach, którzy cenią sobie kontrolę nad własnym sprzętem. Domyślnie urządzenie działa w oparciu o ESPHome, ale nic nie stoi na przeszkodzie, by:
- 🔄 wgrać własne oprogramowanie (ESP-IDF, Arduino, MicroPython itp.),
- 🔌 zintegrować urządzenie z innymi systemami automatyki,
Otwarty dostęp do kodu, dokumentacja oraz znany ekosystem ESP32 sprawiają, że urządzenie może być łatwo dostosowane do niestandardowych potrzeb i protokołów
Oprogramowanie dostępne na: https://github.com/IoTLabs-pl/PanaProxy


